图的匹配
图的匹配相关概念
匹配 或是 独立边集 是一张图中不具有公共端点的边的集合。
在二分图中求匹配等价于网路流问题。
图匹配算法是信息学竞赛中常用的算法,总体分为最大匹配以及最大权匹配,先从二分图开始介绍,再进一步提出一般图的作法。
图的匹配
在图论中,假设图 $G=(V,E)$,其中 $V$ 是点集,$E$ 是边集。
一组两两没有公共点的边集 $M(M\in E)$ 称为这张图的 匹配。
定义匹配的大小为其中边的数量 $|M|$,其中边数最大的 $M$ 为 最大匹配。
当图中的边带权的时候,边权和最大的为 最大权匹配。
匹配中的边称为 匹配边,反之称为 未匹配边。
一个点如果属于 $M$ 且为至多一条边的端点,称为 匹配点,反之称为 未匹配点。
极大匹配(maximal matching):无法再增加匹配边的匹配。不一定是最大匹配。
最大匹配(maximum matching or maximum cardinality matching):匹配边数量最多的匹配。最大匹配可能有不止一个,但最大匹配的边数是确定的,而且不可能超过图中定点数的一半。
最大权匹配(maximum weight matching):加权图中,权值和最大的匹配。
最大权最大匹配(maximum weight maximum cardinality matching):匹配数最多的前提下,边权和最大的匹配。即所有最大匹配中,边权和最大的匹配。
完美匹配(perfect matching):所有点都属于匹配,同时也符合最大匹配。若图 G 为完全图且顶点数为偶数时,必然存在完美匹配。
近完美匹配(near-perfect matching):发生在图的点数为奇数,刚好只有一个点不在匹配中,扣掉此点以后的图称为 factor-critical graph。
maximal matching

最大匹配

最大权匹配

最大权最大匹配

二分图匹配

一张二分图上的匹配称作二分匹配
设 $G$ 为二分图,若在 $G$ 的子图 $M$ 中,任意两条边都没有公共节点,那么称 $M$ 为二分图 $G$ 的一个匹配,且 $M$ 的边数为匹配数。
完美匹配
设 $G=\langle V_1, V_2, E \rangle$ 为二分图,$|V_1| \leq |V_2|$,$M$ 为 $G$ 中一个最大匹配,且 $|M|=|V_1|$,则称 $M$ 为 $V_1$ 到 $V_2$ 的完美匹配。
二分图
染色法:使用两种颜色,给图上每一点涂上颜色,使得相邻两点颜色不同
不存在奇数环、染色法不存在矛盾
匈牙利算法,匹配、最大匹配、匹配点、增广路径
最小点覆盖、最大独立集、最小路径点覆盖(最小路径重复点覆盖)
最大匹配数=最小点覆盖=(总点数-最大独立集)=(总点数-最小路径覆盖)
染色法判断二分图
使用两种颜色,给图上每一点涂上颜色,使得相邻两点颜色不同
用一个color数组记录颜色,直接dfs即可
1 | |
匈牙利算法
定理一:“图G中的一个匹配M是最大匹配”的充分必要条件是“G中不存在M的增广路径”。
根据定理一,匈牙利算法的核心思路是:任选一条边作为初始匹配M,然后通过寻找增广路径来扩大匹配M中边的条数,直到无法继续扩展新的边,此时M为最大匹配。其中,算法的关键在于寻找增广路径。
匈牙利算法的执行过程,以程序语言总结如下:
- 初始化顶点编号(1~N),令循环顶点索引 X=1
- 如果X>N, 结束;如果X<=N, 进入Step3
- 利用dfs寻找 以X为起点的增广路径,并对M进行扩展(如果没有找到,则不对M进行扩展)。X++,转Step2
1 | |
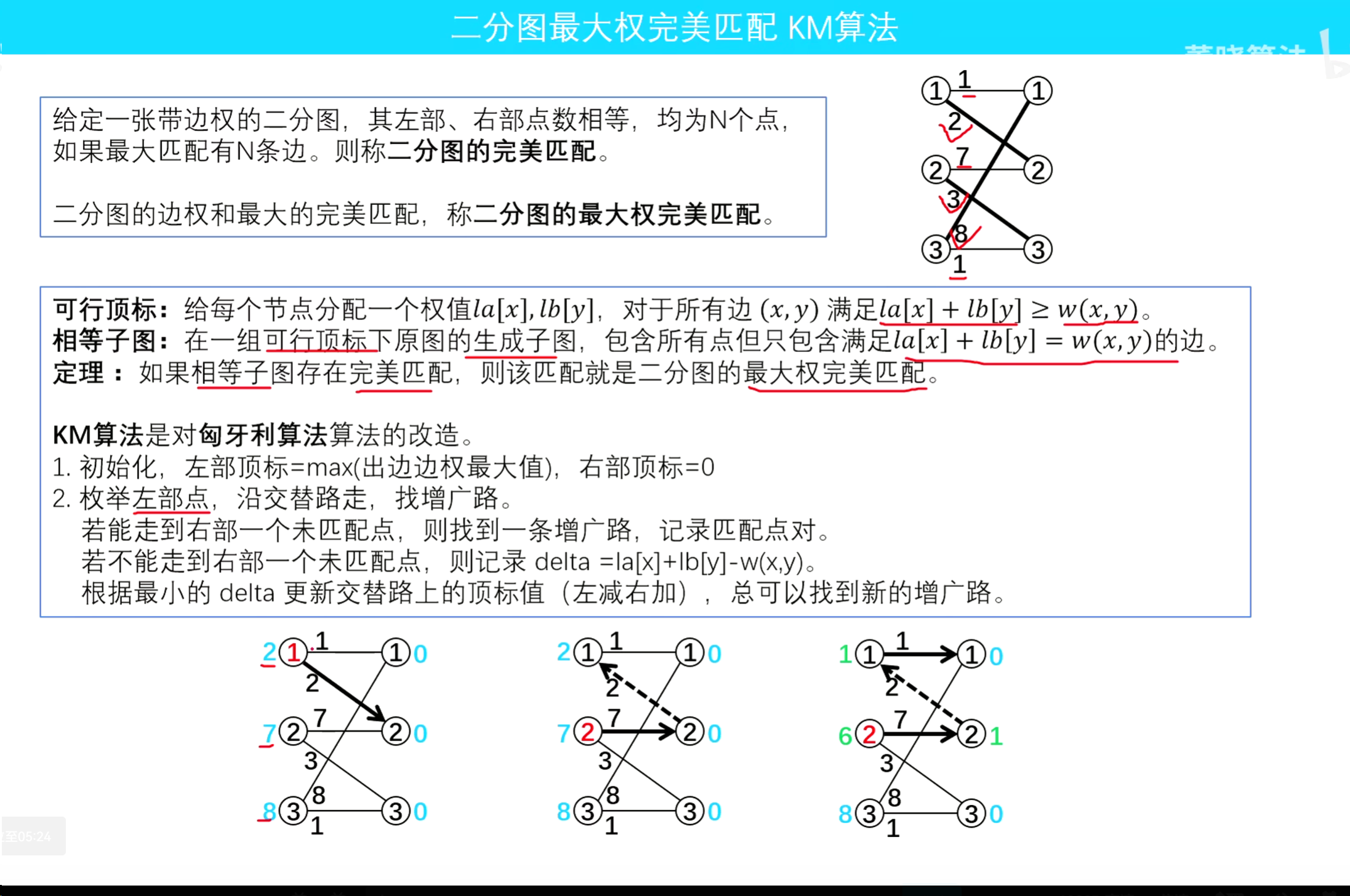
KM算法
匈牙利算法,主要在于解决无权二分图的最大匹配问题;而如果要寻找完全二分图的最大权匹配,需要用到KM算法。
dfs算法
1 | |
bfs写法
1 | |
其他图的匹配相关概念
支配集
对于无向图 $G=(V, E)$,若 $V’\subseteq V$ 且 $\forall v\in(V\setminus V’)$ 存在边 $(u, v)\in E$ 满足 $u\in V’$,则 $V’$ 是图 $G$ 的一个 **支配集 (dominating set)**。
无向图 $G$ 最小的支配集的大小记作 $\gamma(G)$。求一张图的最小支配集是 NP 困难 的。
对于有向图 $G=(V, E)$,若 $V’\subseteq V$ 且 $\forall v\in(V\setminus V’)$ 存在边 $(u, v)\in E$ 满足 $u\in V’$,则 $V’$ 是图 $G$ 的一个 **出 - 支配集 (out-dominating set)**。类似地,可以定义有向图的 **入 - 支配集 (in-dominating set)**。
有向图 $G$ 最小的出 - 支配集大小记作 $\gamma^+(G)$,最小的入 - 支配集大小记作 $\gamma^-(G)$。
边支配集
对于图 $G=(V, E)$,若 $E’\subseteq E$ 且 $\forall e\in(E\setminus E’)$ 存在 $E’$ 中的边与其有公共点,则称 $E’$ 是图 $G$ 的一个 **边支配集 (edge dominating set)**。
求一张图的最小边支配集是 NP 困难 的。
独立集
对于图 $G=(V, E)$,若 $V’\subseteq V$ 且 $V’$ 中任意两点都不相邻,则 $V’$ 是图 $G$ 的一个 **独立集 (independent set)**。
图 $G$ 最大的独立集的大小记作 $\alpha(G)$。求一张图的最大独立集是 NP 困难 的。
匹配
对于图 $G=(V, E)$,若 $E’\in E$ 且 $E’$ 中任意两条不同的边都没有公共的端点,且 $E’$ 中任意一条边都不是自环,则 $E’$ 是图 $G$ 的一个 **匹配 (matching)**,也可以叫作 **边独立集 (independent edge set)**。如果一个点是匹配中某条边的一个端点,则称这个点是 **被匹配的 (matched)/饱和的 (saturated)**,否则称这个点是 **不被匹配的 (unmatched)**。
边数最多的匹配被称作一张图的 **最大匹配 (maximum-cardinality matching)**。图 $G$ 的最大匹配的大小记作 $\nu(G)$。
如果边带权,那么权重之和最大的匹配被称作一张图的 **最大权匹配 (maximum-weight matching)**。
如果一个匹配在加入任何一条边后都不再是一个匹配,那么这个匹配是一个 **极大匹配 (maximal matching)**。最大的极大匹配就是最大匹配,任何最大匹配都是极大匹配。极大匹配一定是边支配集,但边支配集不一定是匹配。最小极大匹配和最小边支配集大小相等,但最小边支配集不一定是匹配。求最小极大匹配是 NP 困难的。
如果在一个匹配中所有点都是被匹配的,那么这个匹配是一个 **完美匹配 (perfect matching)**。如果在一个匹配中只有一个点不被匹配,那么这个匹配是一个 **准完美匹配 (near-perfect matching)**。
求一张普通图或二分图的匹配或完美匹配个数都是 #P 完全 的。
对于一个匹配 $M$,若一条路径以非匹配点为起点,每相邻两条边的其中一条在匹配中而另一条不在匹配中,则这条路径被称作一条 **交替路径 (alternating path)**;一条在非匹配点终止的交替路径,被称作一条 **增广路径 (augmenting path)**。
托特定理:$n$ 阶无向图 $G$ 有完美匹配当且仅当对于任意的 $V’ \subset V(G)$,$p_{\text{odd}}(G-V’)\leq |V’|$,其中 $p_{\text{odd}}$ 表示奇数阶连通分支数。
托特定理(推论):任何无桥 3 - 正则图都有完美匹配。
点覆盖
对于图 $G=(V, E)$,若 $V’\subseteq V$ 且 $\forall e\in E$ 满足 $e$ 的至少一个端点在 $V’$ 中,则称 $V’$ 是图 $G$ 的一个 **点覆盖 (vertex cover)**。
点覆盖集必为支配集,但极小点覆盖集不一定是极小支配集。
一个点集是点覆盖的充要条件是其补集是独立集,因此最小点覆盖的补集是最大独立集。求一张图的最小点覆盖是 NP 困难 的。
一张图的任何一个匹配的大小都不超过其任何一个点覆盖的大小。完全二分图 $K_{n, m}$ 的最大匹配和最小点覆盖大小都为 $\min(n, m)$。
边覆盖
对于图 $G=(V, E)$,若 $E’\subseteq E$ 且 $\forall v\in V$ 满足 $v$ 与 $E’$ 中的至少一条边相邻,则称 $E’$ 是图 $G$ 的一个 **边覆盖 (edge cover)**。
最小边覆盖的大小记作 $\rho(G)$,可以由最大匹配贪心扩展求得:对于所有非匹配点,将其一条邻边加入最大匹配中,即得到了一个最小边覆盖。
最大匹配也可以由最小边覆盖求得:对于最小边覆盖中每对有公共点的边删去其中一条。
一张图的最小边覆盖的大小加上最大匹配的大小等于图的点数,即 $\rho(G)+\nu(G)=|V(G)|$。
一张图的最大匹配的大小不超过最小边覆盖的大小,即 $\nu(G)\le\rho(G)$。特别地,完美匹配一定是一个最小边覆盖,这也是上式取到等号的唯一情况。
一张图的任何一个独立集的大小都不超过其任何一个边覆盖的大小。完全二分图 $K_{n, m}$ 的最大独立集和最小边覆盖大小都为 $\max(n, m)$。
团
对于图 $G=(V, E)$,若 $V’\subseteq V$ 且 $V’$ 中任意两个不同的顶点都相邻,则 $V’$ 是图 $G$ 的一个 **团 (clique)**。团的导出子图是完全图。
如果一个团在加入任何一个顶点后都不再是一个团,则这个团是一个 **极大团 (maximal clique)**。
一张图的最大团的大小记作 $\omega(G)$,最大团的大小等于其补图最大独立集的大小,即 $\omega(G)=\alpha(\bar{G})$。求一张图的最大团是 NP 困难 的。